Overview
A stack to make a fully autonomous drone capable of navigating indoor environment by integrating ORB-SLAM3 on a DJI Tello. The project uses a combination of Python and C++ and uses ROS2 to make the nodes communicate.
Nodes structure
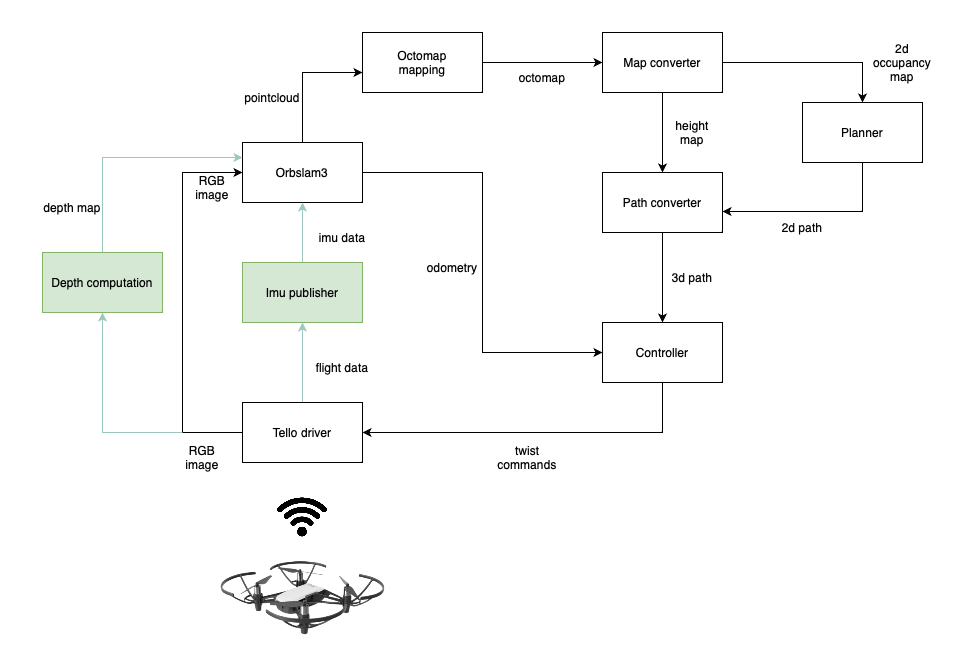
The green boxes indicate optional further development nodes.
This project is still a work in progress.
You can view the progress on my GitHub and contribute if you'd like!
View Code on GitHub
⭐ Loading...